用仿生眼引爆机器人寒武纪(2)
【作者】网站采编
【关键词】
【摘要】另外,高等动物的双眼还存在双眼协调运动。这一点很重要。这就像我们人的眼睛一样,当我左眼看一个物体的时候,右眼就不能看别的地方了,只能对着
另外,高等动物的双眼还存在双眼协调运动。这一点很重要。这就像我们人的眼睛一样,当我左眼看一个物体的时候,右眼就不能看别的地方了,只能对着这个物体看。这对于捕猎动物来说是必备的,因为它要看清楚猎物的距离并保持稳定。
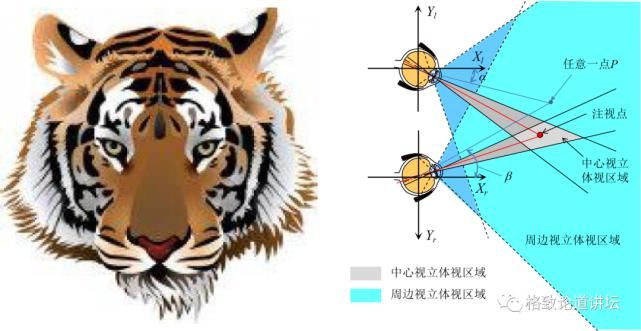 老虎捕猎时会进行双眼协调运动(左)和双眼协调运动示意图(右)
老虎捕猎时会进行双眼协调运动(左)和双眼协调运动示意图(右)
比如,右图中间视线汇集的红点叫注视点。当我们看向哪里,双眼的两个光轴就对着哪里。灰色的中心视立体视区域范围很小,这是双眼能看清楚的地方;周围视场角比较广的地方则看得比较模糊。像老虎这种动物,包括人也是一样,盯着猎物看的时候,一定要把两只眼睛对准它。这两只眼睛就同时产生了各种运动,叫做协调运动。
思想晚餐
已完成:30%?//////////
视觉需要几乎整个脑的参与
眼球运动又是高智商的一种体现。我们在做仿生眼的时候,最难的地方就是我们不能进行人为控制。我们不能通过点击鼠标来告诉仿生眼应该看指定位置,而是要让它自己决定看哪里。
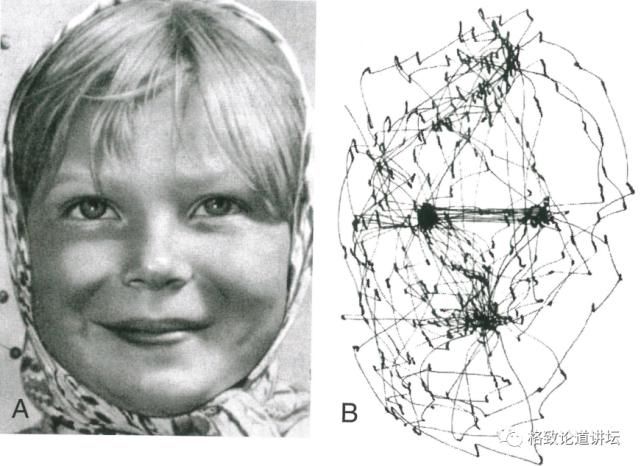 当一个人看左图中的小女孩的时侯,右图就是他的视线移动轨迹。大家可以看到视线最集中的地方是小女孩的眼睛和嘴。我们可以理解为人的眼睛和嘴,这对于了解一个人是最重要的。眼睛一直盯着这些地方看,视线会随之变化。如果我们的机器人能有这个智商水平,那这种机器人就活了。
当一个人看左图中的小女孩的时侯,右图就是他的视线移动轨迹。大家可以看到视线最集中的地方是小女孩的眼睛和嘴。我们可以理解为人的眼睛和嘴,这对于了解一个人是最重要的。眼睛一直盯着这些地方看,视线会随之变化。如果我们的机器人能有这个智商水平,那这种机器人就活了。
刚才讲到,视觉几乎能够影响到整个大脑,或者说几乎整个大脑都参与了视觉协同。
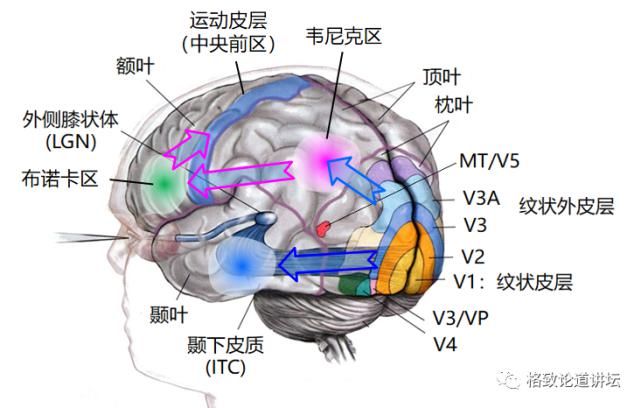 从视觉开始的大脑信息处理系统
从视觉开始的大脑信息处理系统
从上图中大家可以看到,外侧晶状体通过视放线把眼睛看到的图像运到了V1(初级视皮层)领域,接着扩展到V2、V3(纹外皮质),然后图像逐渐进入到MT即V5区域,再进入到韦尼克区。通过一层层不断地处理,图像到韦尼克区的时候就已经变成了语义。语义是什么?就是当我看到一个图像时,能把图像理解成文字或者意思。
接着又进入到布诺卡区,又叫运动语言区。它能够对意思进行处理,变成我们要想说的或者我们想做的事。如果没有这一部分,人的表达就会语无伦次,虽然能讲话,但是讲不通顺。
再往上就是运动皮层,它控制着我们的动作,让我们做出决策。然后再往下走就进入了颞叶,颞叶与听觉和前庭有关,通过颞叶,人能够知道自己的位置。
再之后又进入到海马,海马是记忆和位置识别的地方。如果看到海马某一个地方的神经兴奋了,我就能知道这个人在什么位置。我们在实验中也常常借助这一特点。根据老鼠的海马区域的神经兴奋状态,我们就能知道老鼠在什么地方,这是一个很重要的研究。
所以,几乎整个大脑都参与了视觉的处理,小脑也用来做控制,而脑干的部分更是如此。
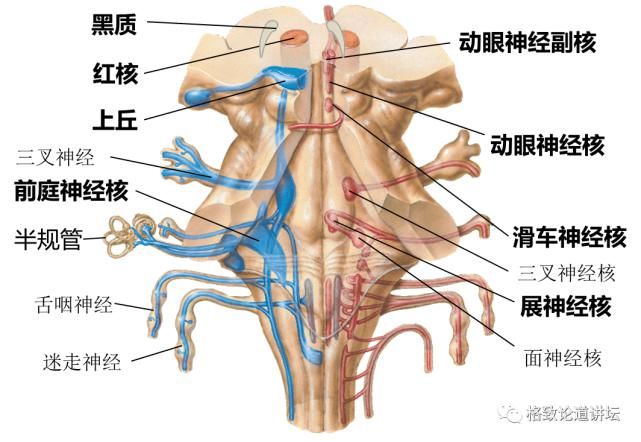 脑干
脑干
我们可以看到,脑干上的动眼神经核控制眼球往里转,展神经核控制眼球往外转,滑车神经核控制眼球旋转等等。所以,脑干上的很多部分也控制着眼睛,这就可以看到眼睛的重要性。
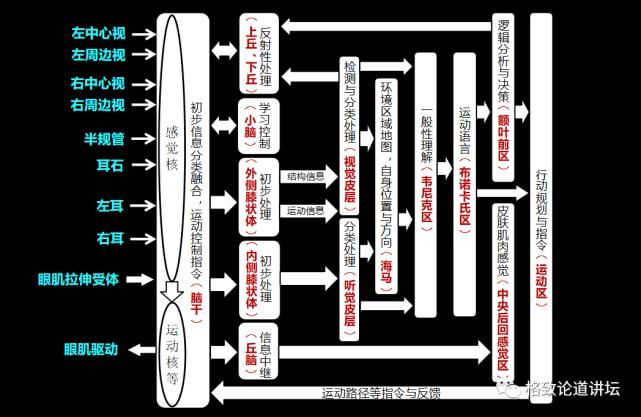 类脑系统的框架
类脑系统的框架
上图展示了大脑系统比较粗的框架结构。大家可以看到脑干的位置,以及小脑、上丘、晶状体和丘脑的功能。我们还能看到大脑视觉皮层,还有刚才讲的V1、V2、V3、海马和韦尼克区的功能等等。
眼球运动控制神经系统的数学模型
除此之外,我们还有一些小型的框架,比如脑干上的各个神经是怎么连接的。我们用数学模型来做眼球运动控制系统。我们研发了脑干上的眼球运动控制系统的数学模型,所以我们成功做出来了一套仿生眼。
思想晚餐
已完成:50%?//////////
仿生眼具备的独特功能
我们制造的仿生眼的眼球力量很大,扳都扳不太动。这个仿生眼是可以旋转的,和通常的防抖系统不太一样。即便我们把它拿起来晃,它接收到的的图像依旧很稳定,因为仿生眼的防震效果非常好。
仿生眼功能:多种眼球运动信号的融合
视频中的仿生眼的眼球在跟着这个人的照片走,即使下面的桌子在晃,也不影响它的跟踪。它仍然能保证照片在它的视觉正中心。
这是什么原因呢?这叫做前庭动眼反射,也就是我们人类通过耳朵里的半规管来控制眼睛。在仿生眼中叫做叫IMU,也就是用陀螺和加速度传感器来控制眼睛。这样眼睛就不受震动的影响,头部震动也不会影响到它。
文章来源:《中国体视学与图像分析》 网址: http://www.zgtsxytxfx.cn/zonghexinwen/2021/0707/678.html